Convolution in CNN
这篇笔记是对 torch.nn.Conv2d [ 官方文档 ] 的解释,
主要目标是弄清楚在这层 layer 中发生了什么:
输入输出是什么?是怎么从输入到输出的?
最后补充了一个困扰我很久的问题:
为什么要叫 convolution?
Input/Output
文档中明确给出了输入输出的类型:有四个维度 (N, C, H, W) 的 tensor, 用 NumPy 的术语来说就是 4d array. 其中
- N: Batch size, 即样本的个数,或者说一次计算操作的图片张数。 注意,N 的大小完全不影响网络结构, 所以它也没有出现在构造网络所需的参数表里。 个人认为这个维度的存在完全是为了计算上的方便。 因为对数据库中不同的图片进行的操作是完全一样的, 所以在训练或者预测时不妨直接多张同时计算。 显然,这个维度的大小始终不变。 输入有多少张图片, 输出就是多少张图片对应的计算结果。 实际使用时让这个维度始终为 1 也可。 当然,如果要进行 BatchNorm 操作, 那输入样本数必须大于 1.
- C: Channel size, 即图片的通道数。 若输入是 RGB 图像,Cin 就是 3,若是灰度图像则为 1。 注意,输出的 Channel size 是不一样的,Cout 应当理解为特征的通道。 后面会提到,在计算每一个输出通道的结果时,所有输入通道的图像数据都被用到了。 也就是说, 并不是 对 R G B 三个通道的图像分别进行同样的处理。 这样即使输出只有 1 个通道,计算结果也会考虑颜色带来的影响。 在构造 Conv2d layer 时的两个必要参数就是 Cin 和 Cout。 实际使用时一般也仅需指定这两个参数 (外加一个 kernel size).
- H & W: 图片高度和宽度。注意, height 代表的维度是在 width 之前的。 所以像素坐标 (h, w) 代表的是图像从左上角开始数,向右数第 w 格, 往下数 h 格的像素点。和数学中常见的第一个维度代表横轴,第二个维度代表纵轴 非常不同。这两个维度的大小在输入输出中不必相同。 Hout, Wout 是依据 Hin, Win 和一些其它参数自动确定的。 这种依赖关系是 convolution 操作本身决定的,所以不能直接指定输出的大小, 需要通过调整其他参数来间接实现。
总的来说,除去第一个维度 N, 输入和输出的 shape 是非常不同的. Cin, Cout 需要在设计网络时就确定好, Hout, Wout 则依赖于 Hin 和 Wout.
Parameters
在介绍 Conv2d 的各种参数之前,先简单地介绍输出是怎样从输入算得的。官方 文档中给出的公式是 \[ output(N_i, C_{outj}) = bias(C_{outj}) + \sum_{k}^{C_{in}-1} weight(C_{outj},k) \star input(N_i, k) \] 其中 \(\star\) 是 correlation 算符。
因为 input, output 都是 4d array, 所以指定 N, C 两个维度后得到的其实是矩阵。 上式其实是矩阵等式。 然后我们观察到 weight 和 N 无关, 这在前面已经解释了,因为 N 这个维度相当于数据库中样本的编号, 当然不可能每个样本都对应一套网络参数。 但这不代表 weight 就少了一个维度,它仍然是 4d array, 只不过 shape 和输入输入稍有不同,是 Cout, Cin, K, K. 而 K 是 kernel size. 如果我们让 N 和 Cout 均为 1, 那么 output.shape 就是 1, 1, Hout, Wout, 等价于二维矩阵。 此时的计算过程等价于用 Cin 个 K x K 大小的 kernel 分别对 每个输入 channel 的图像矩阵作滤波然后 加权求和 。
在最简单的情形, N, Cout, Cin 都是 1 时, 只有一个 kernel,并且输入输出都可视为 2d array, 用 k 代表 kernel size. 那么输出可以写成
output[i,j] = dot(kernel, input[i:i+k, j:j+k])
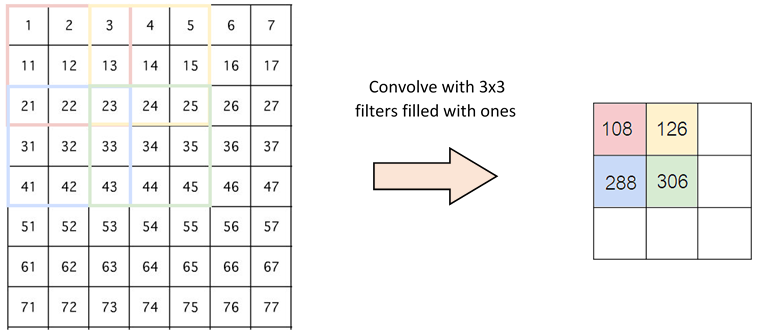
这里 dot 表示将两个矩阵展开为一维向量后作内积。 这个公式可以用下图形象地表述。
上图中绿色的 image 表示输入矩阵,黄色的 3 x 3 矩阵代表 kernel,右边的红 色矩阵是输出结果。用这个公式可以计算出输出矩阵的形状。为了保证下标不越 界,需要 i + k ≤ Hin, 同时 j + k ≤ Wout, 所以 \[ H_{out} = 1 + \max i = H_{in} - k + 1,\qquad W_{out} = 1 + \max j = W_{in} - k + 1. \]
stride
参数 stride 控制每次 kernel 滑动的步长,用公式表述就是
output[i,j] = dot(kernel, input[stride*i:stride*i + k,
stride*j:stride*j + k])
padding
从之前的公式看出,一般输出矩阵的大小是小于输入矩阵的。 要扩展输出矩阵大小也很简单,只要处理 input array 下标越界的问题就好了。 之前的处理方式成为 valid padding, 即不允许下标越界。 另一种处理方式是 zero padding, 即越界元素均视为 0. zero padding 也有好几种方式,根据对下标越界的容身程度而定。 在 Conv2d 中用 padding 来控制 padding 方式。
- padding=0 表示使用 valid padding, 不允许下标越界。
- padding=1 表示使用 zero padding, 允许第一个指标为 -1 或 Hin, 同时允许第二个指标为 -1 和 Win 并令此类访问的结果为 0. 其他类型的越界不被允许。
- padding=2 同理,允许在横向和纵向越界两个元素。
对于 3 x 3 大小的 kernel, 如果 stride=1, 那么只要设置 padding=1 就能让输出输出有相同的大小。
dilation
控制 kernel 如何覆盖在输入矩阵上,用公式表述就是
output[i,j] = dot(kernel, input[i:i+k*dilation:dilation,
j:j+k*dilation:dilation])
Correlation and Convolution
我最早接触的 correlation, convolution 是在光学课上, 那里是对两个连续信号 f, g 定义的
$$ \begin{aligned} f \ast g (t) &:= \int_{-\infty}^{\infty} f(\tau) g(t-\tau) d\tau, \qquad ({\rm convolution})\\ f \star g(t) &:= \int_{-\infty}^{\infty} f(\tau) g(t+\tau) d\tau, \qquad ({\rm correlation}). \end{aligned} $$所以数学上说,我们之前计算的并不是 convolution, 而是 correlation. 我个人认为 convolution 是沿用了之前 filter 的称呼, 在那里 kernel 一般是中心对称的, correlation, convolution 计算结果相同。 但最早没有接触图像处理中 filter 概念前这个称呼让我迷惑了很久, 一直没想明白为啥明明做的是 correlation 却叫 convolution.